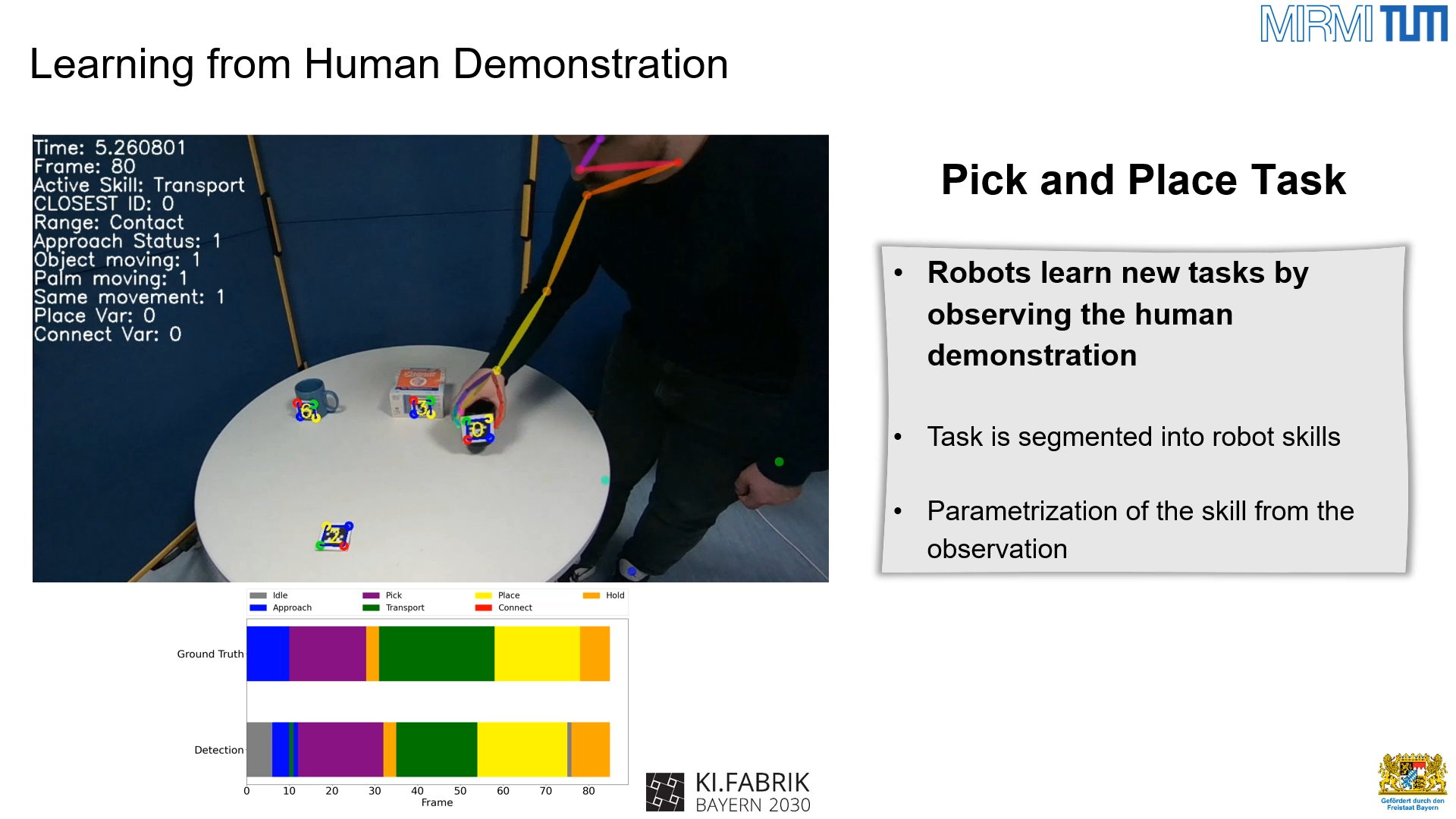
The ability to learn tasks from observation is a key feature of the factory of future, which aims to enable highly automated and intelligent manufacturing systems to adapt to changing demands. Our goal is to develop methods that allow for a time- and cost-efficient re-programming of factory processes by non-expert (in terms of robotics) personnel. [+]
Research Areas
Learning from Human Demonstration
Knowledge Representation for (Household, Medical, Autonomous) Robots

The knowledge that we, humans, posess is one of the defining feaures that makes us intelligent creatures: it enables making optimal decisions, being creative, and generalizing and adapting knowledge. The Concept Hierarchy is a knowledge representation framework for autonomous agents. It is used as an environment digital twin, for understanding dynamic events by recognizing skills, to specify task goals, to plan a skill sequence to solve a given task, to define the behavior of agents when executing skills, and much more. [+]
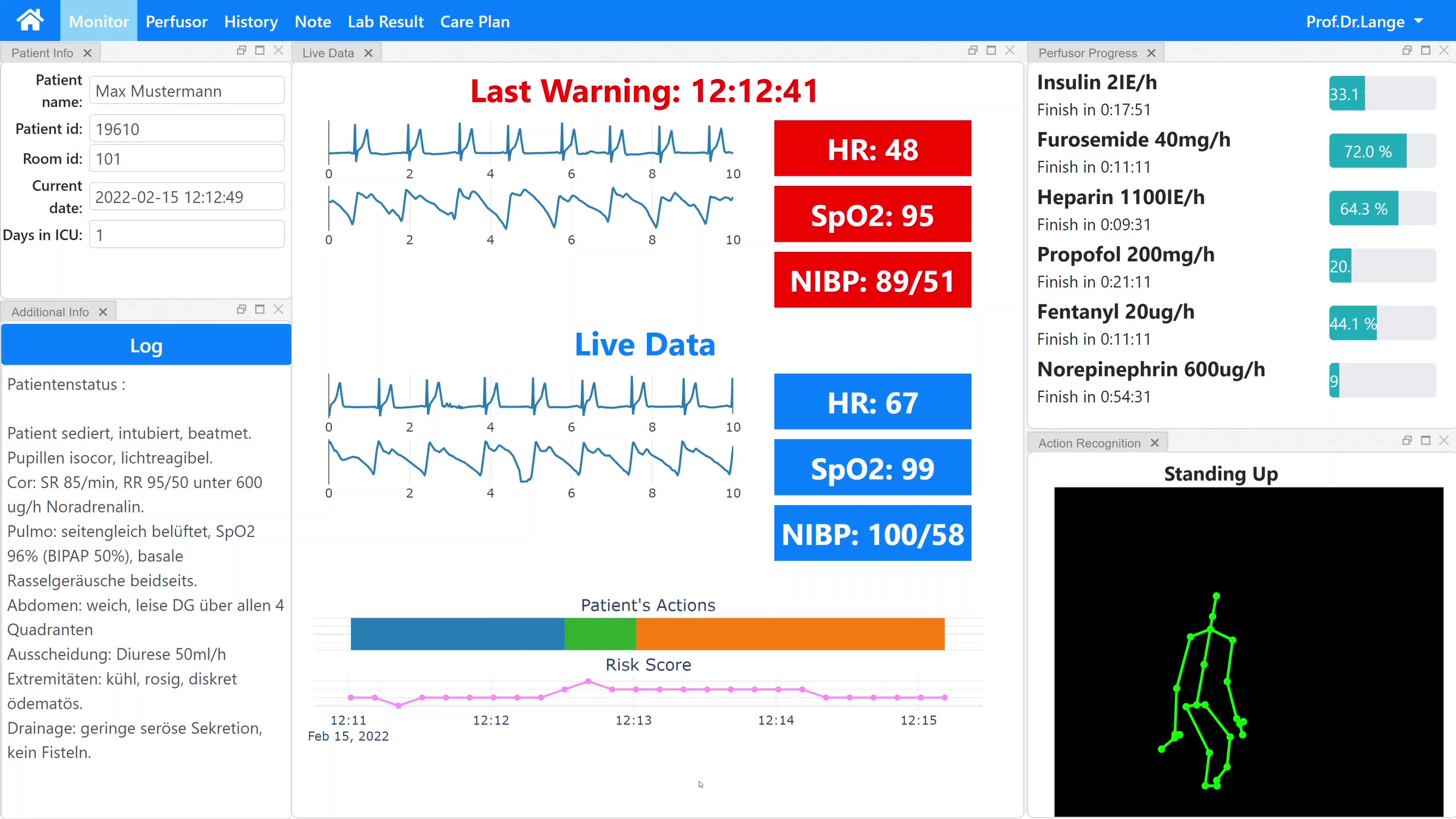
Patient Data Analysis and Visualization
tbd [+]
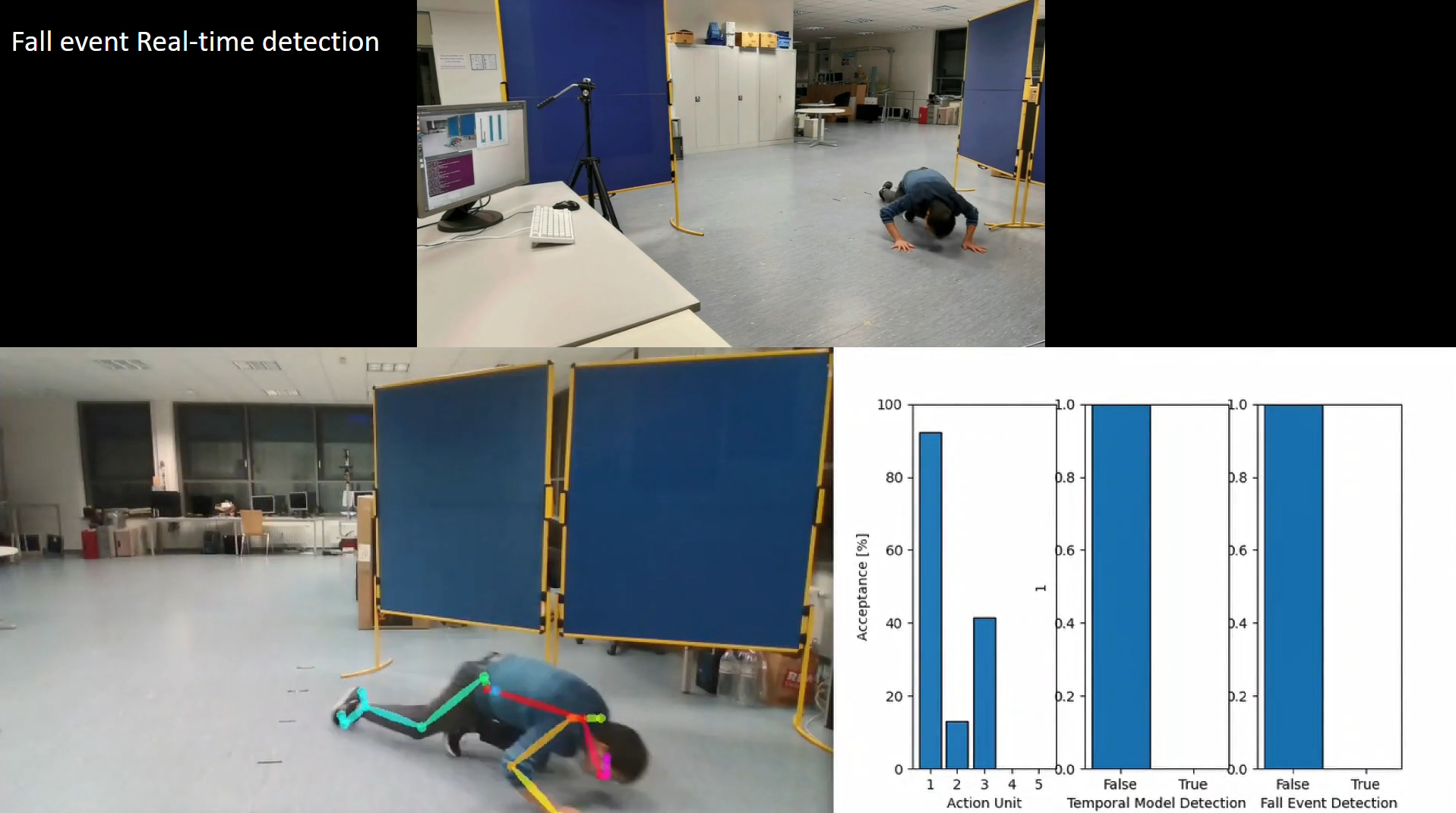
Human Action Analysis
tbd [+]
Multi Target Tracking
tbd [+]